第一次作业
列举目前市面上常用的嵌入式操作系统名字(越多越好)
FreeRTOS:一个小型实时操作系统,特别适用于微控制器和嵌入式设备,具有低延迟和低内存占用的特点。
μC/OS:一种小型、可裁剪的实时操作系统,具有高度可移植性和可裁剪性,适用于各种嵌入式系统。
ThreadX:一款高度优化的实时操作系统,具有快速启动时间和低内存占用,广泛应用于通信、汽车、工业和消费电子等领域。
eCos:嵌入式配置的开源实时操作系统,具有灵活的内核设计和广泛的硬件支持,适用于多种嵌入式应用。
VxWorks:一款功能强大的实时操作系统,被广泛应用于工业控制、航空航天、医疗设备等领域,具有高度可靠性和实时性。
QNX:一种高度可靠的实时操作系统,特别适用于安全关键型嵌入式系统,如汽车、医疗设备和工业控制。
INTEGRITY:一款面向安全关键型应用的实时操作系统,具有严格的安全性和可靠性特性,适用于航空航天、军事和汽车等领域。
Linux Embedded:Linux内核的嵌入式版本,具有广泛的软件支持和社区资源,适用于各种嵌入式应用,从消费电子到工业控制等。
Zephyr:一个开源的实时操作系统,针对小型嵌入式设备和物联网应用,具有灵活的内核设计和可扩展性。
RIOT OS:一款专注于物联网设备的开源操作系统,具有低功耗、低内存占用和多种网络协议支持的特点。
Contiki:一种轻量级的开源操作系统,专注于低功耗和物联网应用,具有分布式网络和IPv6支持。
TinyOS:一款为传感器网络设计的开源操作系统,具有低功耗和高度分布式的特点,适用于传感器节点等嵌入式设备。
NuttX:一个可裁剪的实时操作系统,具有类Unix风格的设计和广泛的硬件支持,适用于各种嵌入式应用。
Mbed OS:一款面向物联网设备的开源操作系统,提供丰富的硬件支持和易用的开发工具,加速物联网产品的开发。
AliOS Things (AliOS-Things):由阿里巴巴推出的物联网操作系统,提供丰富的物联网协议支持和云端服务集成。
RT-Thread:一款开源的实时操作系统,具有小巧灵活、易裁剪和支持多种编程语言等特点。
LiteOS:华为推出的轻量级物联网操作系统,具有低功耗、快速启动和高度安全的特点,适用于各种物联网设备。
HarmonyOS:华为推出的分布式操作系统,具有分布式架构、跨设备共享和高度安全的特点,适用于多种智能设备。
mLinux:一种基于Linux的嵌入式操作系统,具有丰富的软件支持和易用性,适用于各种嵌入式应用。
Contiki-NG:Contiki的下一代版本,继承了Contiki的特点并提供了更多新功能和改进。
列举基于模型的系统工程 与 传统开发流程的优势
基于模型的系统工程
基于模型的系统工程(Model-Based Systems Engineering,MBSE)是一种系统工程方法论,它使用抽象的模型来描述、分析和设计复杂系统的结构、行为和性能。
优势:
- 可视化与抽象化: 使用模型来描述系统结构和行为,使系统设计变得可视化和更易于理解。这有助于团队成员之间的沟通和协作,以及客户对系统的理解。
- 自动化分析与验证: 模型可以用于自动化验证系统的性能、安全性、可靠性等方面的属性,从而提前发现和解决潜在的问题,减少后期成本和风险。
- 迭代开发与快速原型: 模型驱动开发允许快速创建原型和模拟,以便在早期阶段发现和验证设计概念,从而加速开发周期。
- 需求管理和跟踪: 基于模型的系统工程可以将需求与设计、验证和实现过程相集成,实现需求的跟踪和管理,确保系统的最终交付满足客户需求。
- 复用性与组件化: 模型允许设计人员将系统划分为可重用的组件,促进模块化设计和组件化开发,从而提高系统的可维护性和扩展性。
传统开发流程
传统开发流程是指软件或系统开发中使用的传统方法论,通常以线性、阶段性的方式进行,包括需求分析、系统设计、实现、测试和部署等阶段。在传统开发流程中,每个阶段按照严格的顺序进行,并且通常在前一阶段完成后才能开始下一个阶段。
优势:
- 结构清晰: 传统开发流程采用阶段性、线性的开发模式,每个阶段有明确定义的任务和目标,使得项目的结构和进程更加清晰明了。
- 适用性广泛: 传统开发流程已经在许多项目中得到广泛验证和应用,适用于各种规模和类型的软件开发项目,包括大型企业级系统和小型应用软件。
- 规范化和标准化: 传统开发流程强调项目管理、文档管理和质量控制,有成熟的工作流程和标准化的文档模板,有助于提高开发质量和可维护性。
- 风险管理: 传统开发流程通过将项目分解为多个阶段,并在每个阶段引入严格的验证和审查机制,有助于及早发现和解决问题,降低项目风险。
- 可控性和可预测性: 传统开发流程通过严格的计划和控制,使得项目的进度和成本更加可控和可预测,有助于满足客户的需求和期望。
- 文档化程度高: 传统开发流程注重文档的编写和管理,包括需求文档、设计文档、测试文档等,有助于记录项目的历史和知识,提高项目的可维护性和可持续性。
列举RISC-V相对ARM构架的优势和缺陷,各三条
优势
- 开放性和灵活性: RISC-V 是一种开放的指令集架构,可以自由访问其规范和设计,而 ARM 架构则受到 ARM 公司的专利限制。这种开放性使得 RISC-V 更具灵活性,可以根据需求进行定制和优化。
- 低成本和可定制性: RISC-V 的开放性使得其在芯片设计和制造方面成本更低,同时也更容易定制,用户可以根据具体应用需求进行自定义设计,提高性能和功耗效率。
- 社区支持和生态系统: RISC-V 社区日益壮大,吸引了众多厂商和开发者的参与,推动了 RISC-V 生态系统的发展。相比之下,ARM 生态系统虽然庞大,但也受到 ARM 公司的控制,对于一些新兴市场和创新项目,RISC-V 的社区支持可能更具吸引力。
劣势
- 由于RISC-V诞生时间太短,相关的编译器、开发工具和软件开发环境(IDE)以及其它生态要素还在发展;
- RISC-V 定义了一个很小的、带有扩展的ISA,导致ISA碎片化;
- RISC-V 尚未实现部分性能的提升,如超标量执行等。
查询自己手机的处理器型号、性能和参数,并描述其ARM版本(或源自的版本),以及指令集的版本

型号:Exynos 1080
性能:三星 Exynos 1080 处理器采用最新(2020年底) 5nm 制程工艺,相较三星 7nm 工艺制程,三星 5nm 制程在晶体管数量密度上增加超过 80%,能够带来更强性能和更低的功耗。三星表示,此次Exynos 1080处理器采用的是全新的CPU架构核心,单核性能提升50%,多核性能提升近2倍。Exynos1080 5G采用1个大核+3个中核+4个小核的核心配置,其中大核与中核采用的是A78的架构,小核采用的是A55的架构。大核最高主频能达到2.8GHz。
参数:
| 项目 | 参数 |
|---|---|
| 网络制式 | 2G/3G/4G/5G |
| CPU制程 | 5nm |
| CPU配置 | 1A78@2.8GHz+3A78@2.6GHz+4*A55@2.0GHz |
| GPU | Mali™-G78 GPU |
| 通用闪存 | UFS 3.1 |
ARM版本
Arm cortex-A78 CPU,Arm cortex-A55 CPU
Mali-G78 GPU
指令集
ARM v8.2
第二次作业
深入调研并介绍IIC总线的结构、通信原理、特点(速度、同步性、双工性等)等。从理解的角度分析IIC总线的优缺点(相对SPI和CAN)
I²C(Inter-Integrated Circuit)总线,也被称作IIC或I2C,是一种广泛使用的串行通信协议,主要设计用于芯片之间的短距离通信。它由Philips Semiconductor(现在的NXP Semiconductors)在1980年代早期推出
IIC总线的结构与通信原理
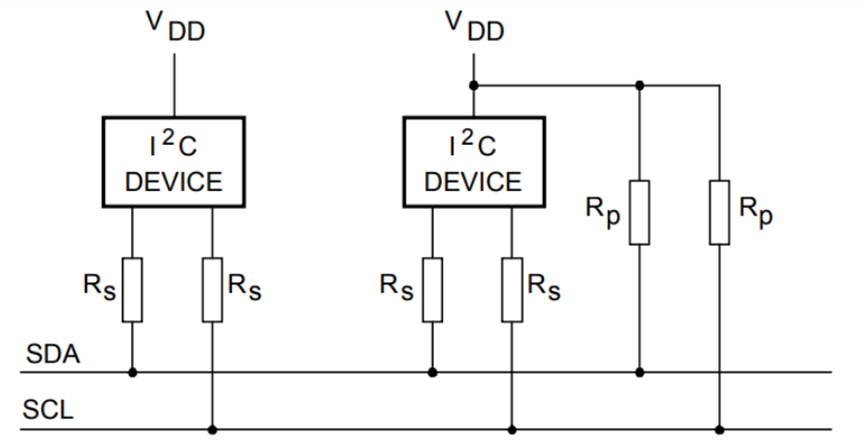
IIC总线采用两线制,包括一个串行数据线(SDA)和一个串行时钟线(SCL),通过这两根线实现多个设备之间的通信。所有的IIC设备都连接到同一对SDA和SCL上,每个设备都有一个唯一的地址。通信的两端各有一个主设备和一个或多个从设备。主设备控制总线的访问,从设备响应主设备的命令并提供数据。总线上的设备通过IIC地址进行寻址。
IIC总线的通信原理
IC总线采用主从结构进行通信,主设备可以是任何一台能够控制总线的设备(通常是微控制器),而从设备则是被控制的设备(如温度传感器、EEPROM存储器等)。通信分为两种模式:传输模式和接收模式。在传输模式下,主设备向从设备发送数据,从设备负责接收并响应;在接收模式下,主设备向从设备发送命令,从设备则会发送数据给主设备。
在IIC总线通信时,主设备控制SCL线的时钟信号,而SDA线上的数据则在时钟信号的控制下进行传输。传输时,主设备在SCL线上产生时钟脉冲,同时在SDA线上发送数据位。从设备在时钟脉冲的控制下读取SDA线上的数据位,并在下一个时钟脉冲的前沿将其应答给主设备。如果数据传输成功,则从设备返回应答信号。
通信时,一个主设备(master)通过SCL线控制时钟信号,启动和终止数据传输,而一个或多个从设备(slave)根据主设备的指令进行响应。
IIC总线的特点
- 速度:IIC总线的速度取决于SCL线上的时钟频率。IIC总线支持多种速度模式,包括标准模式(100kbps)、快速模式(400kbps)、快速模式加(1Mbps)和高速模式(3.4Mbps)。
- 同步性:IIC是一种同步通信协议,意味着数据传输是由时钟信号(SCL)来同步的。主设备通过控制时钟信号来确保通信的同步性,从而保证数据的准确传输。
- 双工性:IIC总线支持双向通信,即主设备和从设备都可以发送和接收数据。主设备可以在任何时候控制总线的访问,并根据需要在总线上发送数据或接收数据。从设备只有在主设备允许时才能发送数据,并且只有在主设备发起读操作时才能发送数据。在同一时间内,IIC总线只能进行读或写操作,不能同时进行,属于半双工同步传输型总线。
- 多主机支持:IIC总线支持多主机系统,即在同一总线上连接多个主设备。在这种情况下,每个主设备都有自己的地址,并且在使用总线之前必须获得总线的控制权。多主机系统可以提高系统的灵活性和可扩展性,可以实现更复杂的系统设计。
- 适用范围广:IIC总线的应用范围非常广泛,可以用于连接各种类型的设备,如传感器、存储器、显示屏、电机驱动器等。它也可以用于通信距离比较短的应用场景,如板级通信、嵌入式系统等。
IIC总线的优点
- 简单性:由于仅使用两根线进行通信,IIC总线的物理接口简单,有利于降低系统的复杂度和成本。相对于SPI总线和CAN总线,IIC总线只需要两条信号线进行通信,因此线路非常简单,易于实现和维护。相比之下,SPI总线需要四条信号线(一个主设备选择线、一个主设备输出线、一个从设备输出线和一个时钟线),而CAN总线需要两条信号线(一个CAN高速线和一个CAN低速线),因此IIC总线在线路复杂度方面具有优势。
- 灵活性:可以在同一总线上连接多个从设备,且每个设备都有唯一的地址,易于扩展。
- 支持多主设备:IIC协议支持多个主设备在同一总线上协作,在同一总线上连接多个主设备,每个主设备都有自己的地址,并且在使用总线之前必须获得总线的控制权,增加了系统的灵活性。而SPI总线只支持单主机系统,CAN总线虽然支持多主机系统,但需要使用更复杂的控制协议。
IIC总线的缺点
- 速度较慢:相比于SPI和CAN,IIC在速度上通常较慢,特别是在数据量大或距离较远的情况下。相比之下,SPI总线的最高速度可以达到100Mbps,CAN总线的最高速度可以达到1Mbps或更高,因此在速度方面,IIC总线具有劣势。
- 总线冲突:在多主模式下,可能会出现总线冲突的情况,需要通过复杂的算法来管理。
- 同步性差:IIC总线的同步性较差,因为IIC总线的时钟由主设备控制,因此在一些高精度时序要求的应用中可能会出现问题。相比之下,SPI总线和CAN总线都具有较好的同步性,因为它们都有独立的时钟线。
- 双工性差:IIC总线的双工性较差,在同一时间内,IIC总线只能进行读或写操作,不能同时进行;而SPI总线和CAN总线都具有良好的双工性,可以同时进行读和写操作。
- 距离限制:由于信号的电容效应,IIC总线在距离较长时可能会出现信号质量问题。
相对于SPI和CAN的比较
- 相对于SPI:SPI通常提供更高的数据传输速率,并且可以实现全双工通信。然而,SPI需要更多的信号线(至少需要三根线,通常是四根),这在物理连接和成本上可能不如IIC经济。
- 相对于CAN:CAN总线专为汽车及其他需要高可靠性和较长距离通信的环境设计,支持更高的抗干扰能力和错误处理机制。IIC则更适用于板级通信或短距离应用,成本更低,但抗干扰能力较弱。
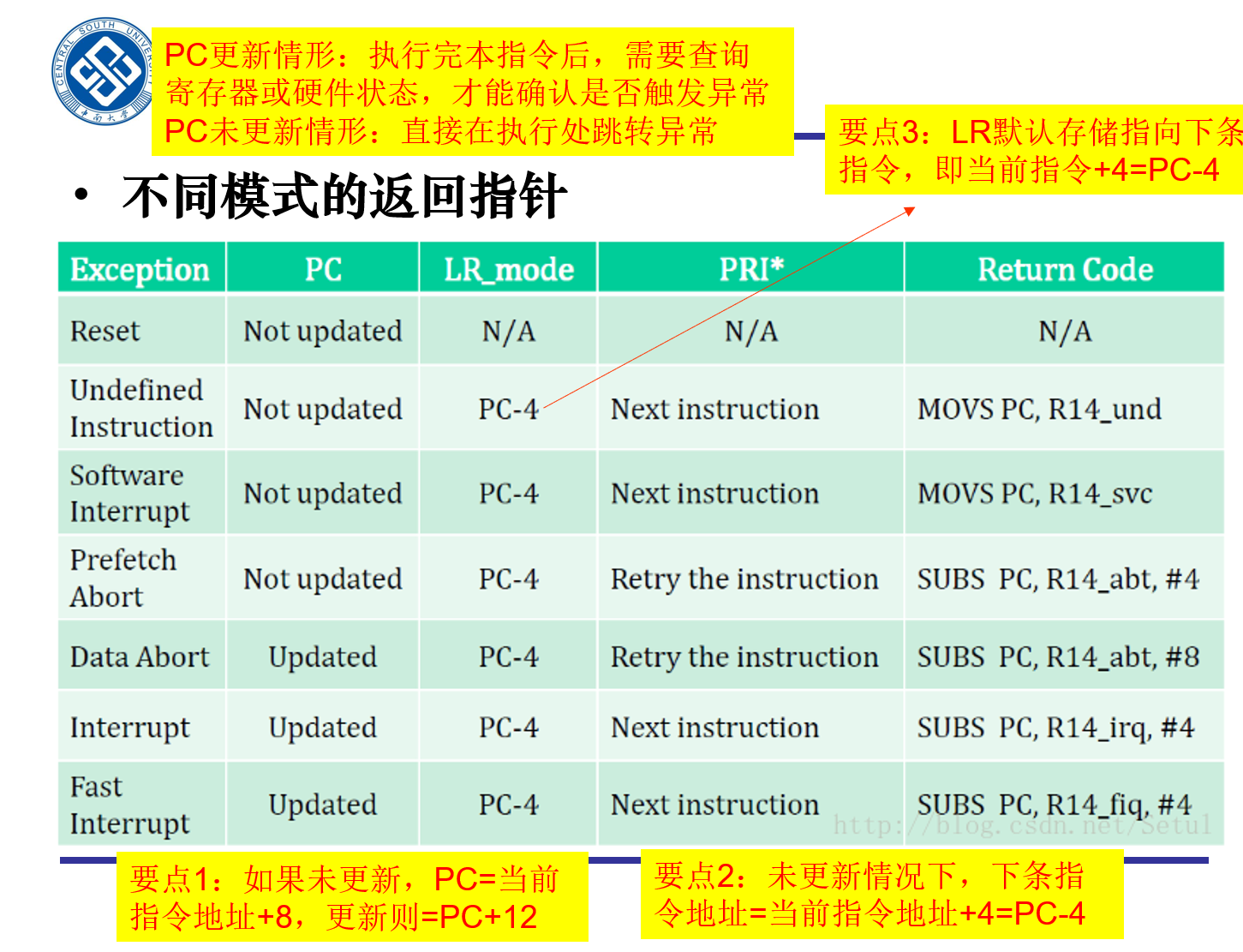
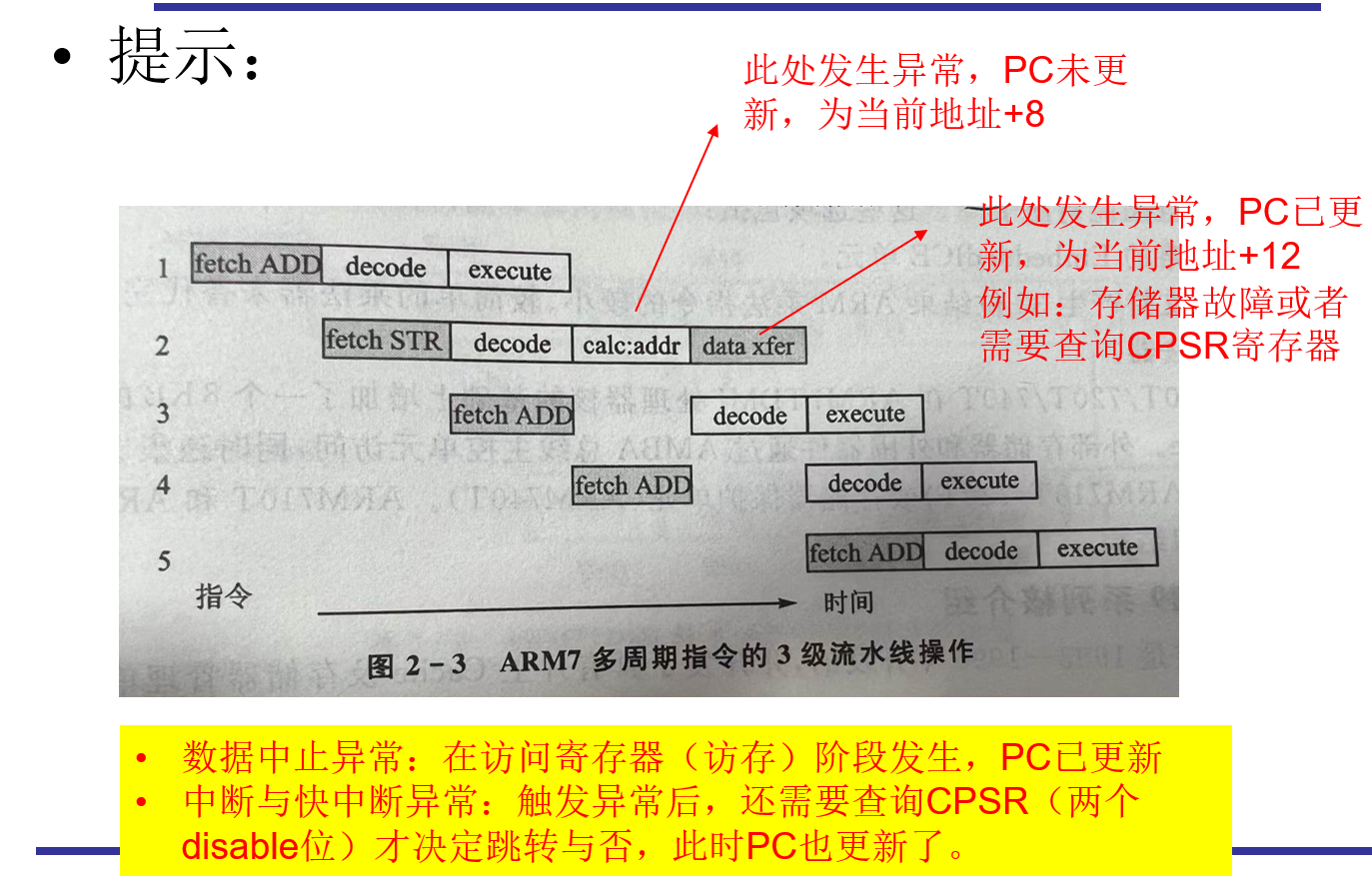
结合下面两幅图和课堂内容,设异常触发指令的地址为0xFFFF0100,计算一下各个异常模式时,PC、LR、PRI*、Return Code的具体取值,写明分析过程。
Reset模式
在Reset模式下,处理器会执行一系列初始化操作,包括将寄存器清零和设置中断向量表等。
PC未更新,PC=异常触发指令地址+8,PC地址0xFFFF0108
LR、PRI*、Return Code均为N/A(不确定)。
Undefined Instruction模式
当处理器遇到一条无法识别的指令时,它会进入Undefined Instruction异常模式。在这个模式下,处理器会暂停执行,并且会向操作系统发出一个异常信号,以便系统处理这个异常。
PC未更新,PC=异常触发指令地址+8,PC地址0xFFFF0108
LR=PC-4,LR地址0xFFFF0104
PRI*为下一条指令的地址,PRI*地址0xFFFF0104
Return Code:MOVS PC,R14_und,当执行 MOVS PC, R14_und 指令时,将恢复PC(从R14_und),并返回到未定义指令后的下一条指令,则Return Code为0xFFFF0104
Software Interrupt模式
当执行软件中断指令时,处理器会进入Software Interrupt异常模式。该模式用于处理与处理器相关的软件中断请求。
PC未更新,PC=异常触发指令地址+8,PC地址0xFFFF0108
LR=PC-4,LR地址0xFFFF0104
PRI*为下一条指令的地址,PRI*地址0xFFFF0104
Return Code:MOVS PC,R14_svc,当执行指令时,将恢复PC(从R14_svc)和CPSR(从SPSR_svc)的值,并返回到SWI的下一条指令,则Return Code为0xFFFF0104
Prefetch Abort模式
当处理器试图执行从内存中读取的非法指令或数据时,会触发Prefetch Abort异常。
PC未更新,PC=异常触发指令地址+8,PC地址0xFFFF0108
LR=PC-4,LR地址0xFFFF0104
PRI*重做指令,PRI*地址0xFFFF0100
Return Code:SUBS PC,R14_abt,#4,当执行指令后,将重新执行被中止的指令,则Return Code为0xFFFF0100。
Data Abort模式
当处理器试图执行或存储非法数据时,会触发Data Abort异常。这可能是因为数据不在可寻址的内存空间中,或者由于硬件错误而导致读取或写入失败。
PC更新,PC=异常触发指令地址+12,PC地址0xFFFF010C
LR=PC-4,LR地址0xFFFF0108
PRI*重做指令,PRI*地址0xFFFF0100
Return Code:SUBS PC,R14_abt,#8,当执行指令后,将重新执行被中止的指令,则Return Code为0xFFFF0100。
Interrupt模式
当处理器接收到来自外部设备的中断信号时,会进入Interrupt异常模式。在该模式下,处理器会执行特定的中断服务例程,以响应外部中断请求。
PC更新,PC=异常触发指令地址+12,PC地址0xFFFF010C
LR=PC-4,LR地址0xFFFF0108
PRI*为下一指令,PRI*地址0xFFFF0104
Return Code:SUBS PC,R14_irq,#4,当执行指令后,将重新执行被中止的指令,则Return Code为0xFFFF0104。
Fast Interrupt模式
当Fast Interrupt信号被触发时,处理器会立即跳转到Fast Interrupt异常模式,并且禁用中断响应。在该模式下,处理器会执行特定的中断服务例程,以尽快响应高优先级的中断请求。
PC更新,PC=异常触发指令地址+12,PC地址0xFFFF010C
LR=PC-4,LR地址0xFFFF0108
PRI*为下一指令,PRI*地址0xFFFF0104
Return Code:SUBS PC,R14_fiq,#4,当执行指令后,将重新执行被中止的指令,则Return Code为0xFFFF0104。
第三次作业
SUB R3,R2,R1,LSR R0 写出上面指令的32位编码,并说明每一位(或几位)的含义。
| 指令编码(从高位到低位) | 位数 | 含义 |
|---|---|---|
| 1110 | 31-28 | 条件位,为默认值AL,表示任何时候都执行本指令 |
| 000 | 27-25 | - |
| 未知 | 24-21 | SUB操作码 |
| 0 | 20 | 不影响CPSR寄存器的值 |
| 0010 | 19-16 | 第一个操作数的寄存器R2 |
| 0011 | 15-12 | 目标寄存器R3 |
| 00000 | 11-7 | 左移位数的存放寄存器R0 |
| 01 | 6-5 | LSR逻辑右移 |
| 0 | 4 | - |
| 0001 | 3-0 | 第二个操作数的寄存器R1 |
读程序,给每一行增加注释,并说明执行过程中R0,R1,R2的值如何变化
AREA StrCopy, CODE, READONLY ; 定义代码区域,不可修改,只可读
ENTRY ; 指定程序的入口点
start ; 程序入口
X EQU 88 ; 定义符号常量X为88
Y EQU 76 ; 定义符号常量Y为76
Z EQU 96 ; 定义符号常量Z为96
STACK_TOP EQU 0X1000 ; 定义符号常量STACK_TOP为0X1000
MOV R0, #0XAB ; 把0XAB的值加载到寄存器R0中,R0=0xAB
LOOP1
MOV R0, R0, ASR #1 ; 把R0右移一位,并把结果存回R0,R0=0x55,第二次执行该语句时变为R0=0x2A
CMP R0, #0X50 ; 比较R0与0X50的大小
BGE LOOP1 ; 如果R0大于等于0X50则跳转到LOOP1标记处(此处会跳转)
MOV R1, #Y ; 把Y的值加载到寄存器R1中,R1=76=0x4C
ADD R2, R0, R1, LSL #1 ; 把R0和R1左移一位的结果相加,存入R2中, R2=R0+R1*2=0xC2
MOV SP, #0X1000 ; 把0X1000的值加载到栈指针寄存器SP中
STR R2, [SP] ; 把R2的值存入以栈指针寄存器SP的值为地址的存储单元中
MOV R0, #Z ; 把Z的值加载到寄存器R0中,R0=96=0x60
AND R0, R0, #0XFF ; 把R0与0XFF进行与运算,存入R0中, R0=0x60
MOV R1, #Y ; 把Y的值加载到寄存器R1中,R1=76=0x4C
ADD R2, R0, R1, LSR #1 ; 把R0和R1右移一位的结果相加,存入R2中,R2=R0+R1/2=0x86
LDR R0, [SP] ; 将以栈指针寄存器SP的值为地址的存储单元中的内容加载到寄存器R0中,R0=0xC2
MOV R1, #0X01 ; 把0X01的值加载到寄存器R1中,R1=0x01
ORR R0, R0, R1 ; 把R0和R1进行或运算,存入R0中,R0=0xC3
MOV R1, R2 ; 把R2的值加载到寄存器R1中,R1=0x86
ADD R2, R0, R1, LSR #1 ; 把R0和R1右移一位的结果相加,存入R2中,R2=R0+R1/2=0x106
STOP
B STOP ; 无条件跳转到STOP标记处,即进入死循环
ENDLOOP1执行两次循环,直到R0=0x2A<0x50
R1=0x4C
R2=R0+R1*2=0xC2
R0=0x60
R1=0x4C
R2=R0+R1/2=0x86
R0=0xC2
R1=0x01
R0=0xC3
R1=0x86
R2=R0+R1/2=0x106
程序最终运行结果为:R0=0xC3, R1=0x86, R2=0x106
第四次作业
安装ARM编译环境
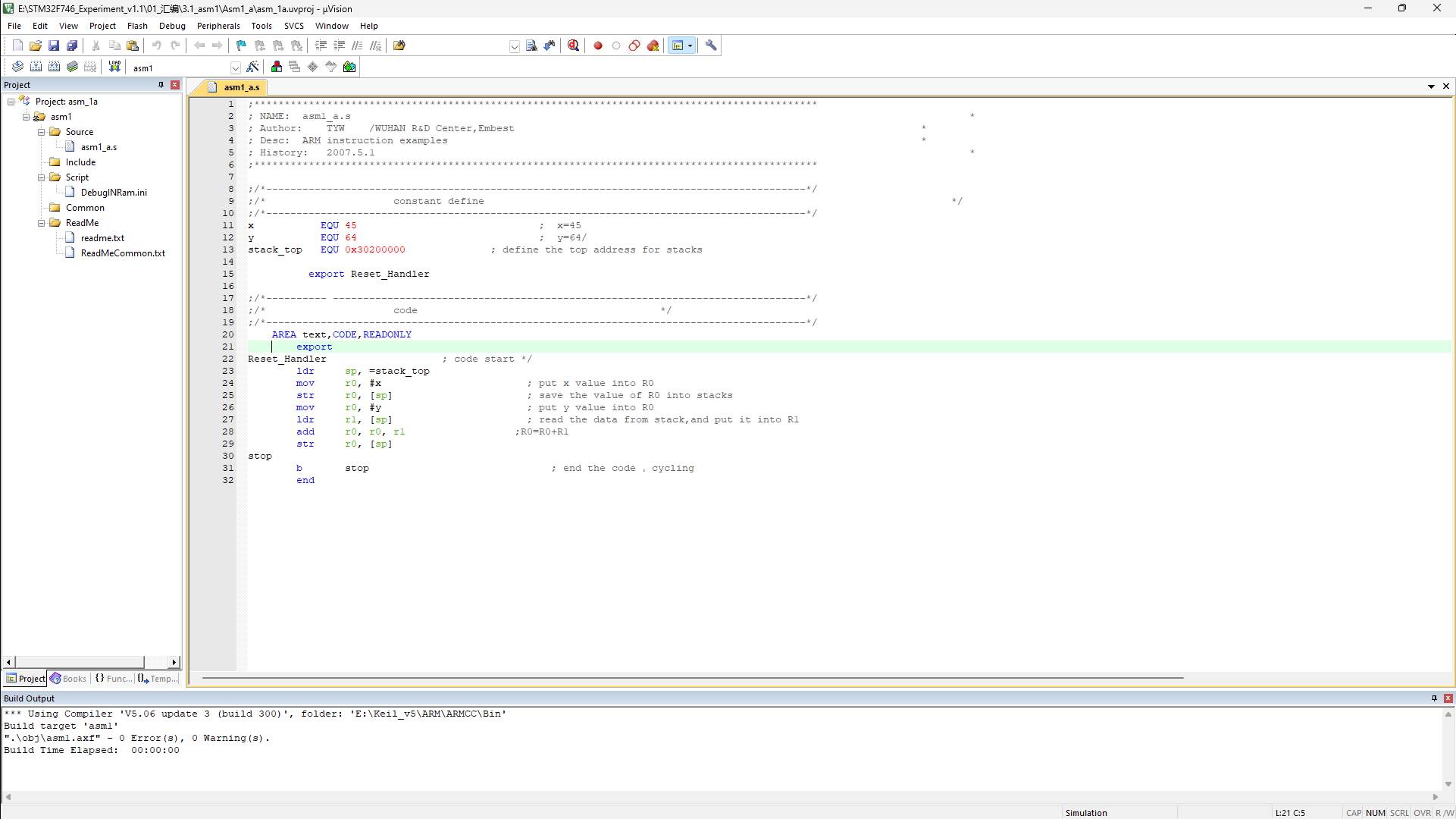
对项目代码进行编译,显示0 Errors, 0 Warnings,说明环境配置正常,编译通过;
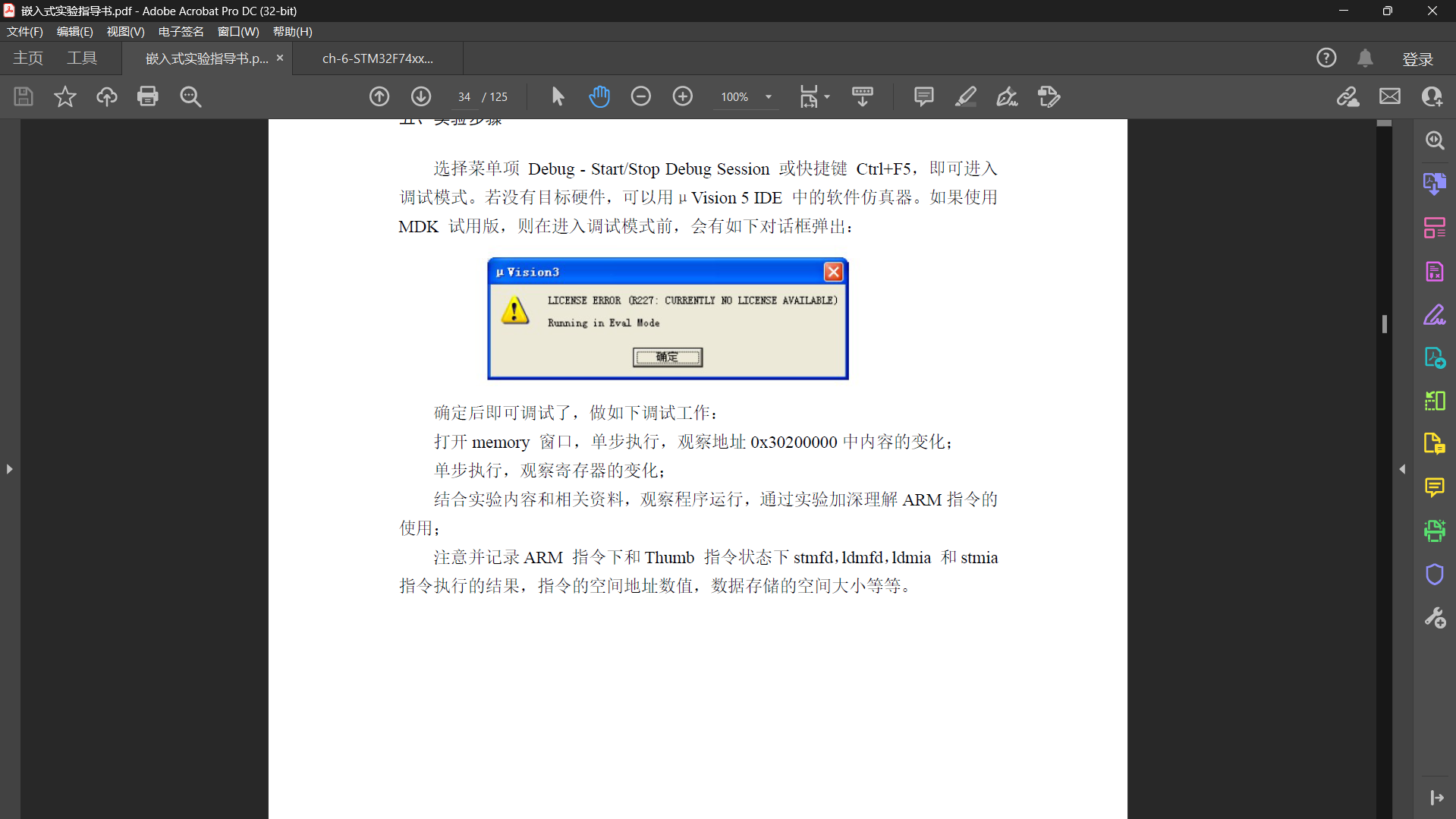
运行STM32F746_Experiment_v1.1\01_汇编\3.1_asm1\Asm1_b例程,进入debug模式
1)阅读并调试代码,观察每行代码的地址位置、代码指令编码、代码反编译结果、寄存器更新值。在提交作业中,把所有代码复制一遍,在注释中给出每行代码运行后寄存器(或存储器)的值更新情况。
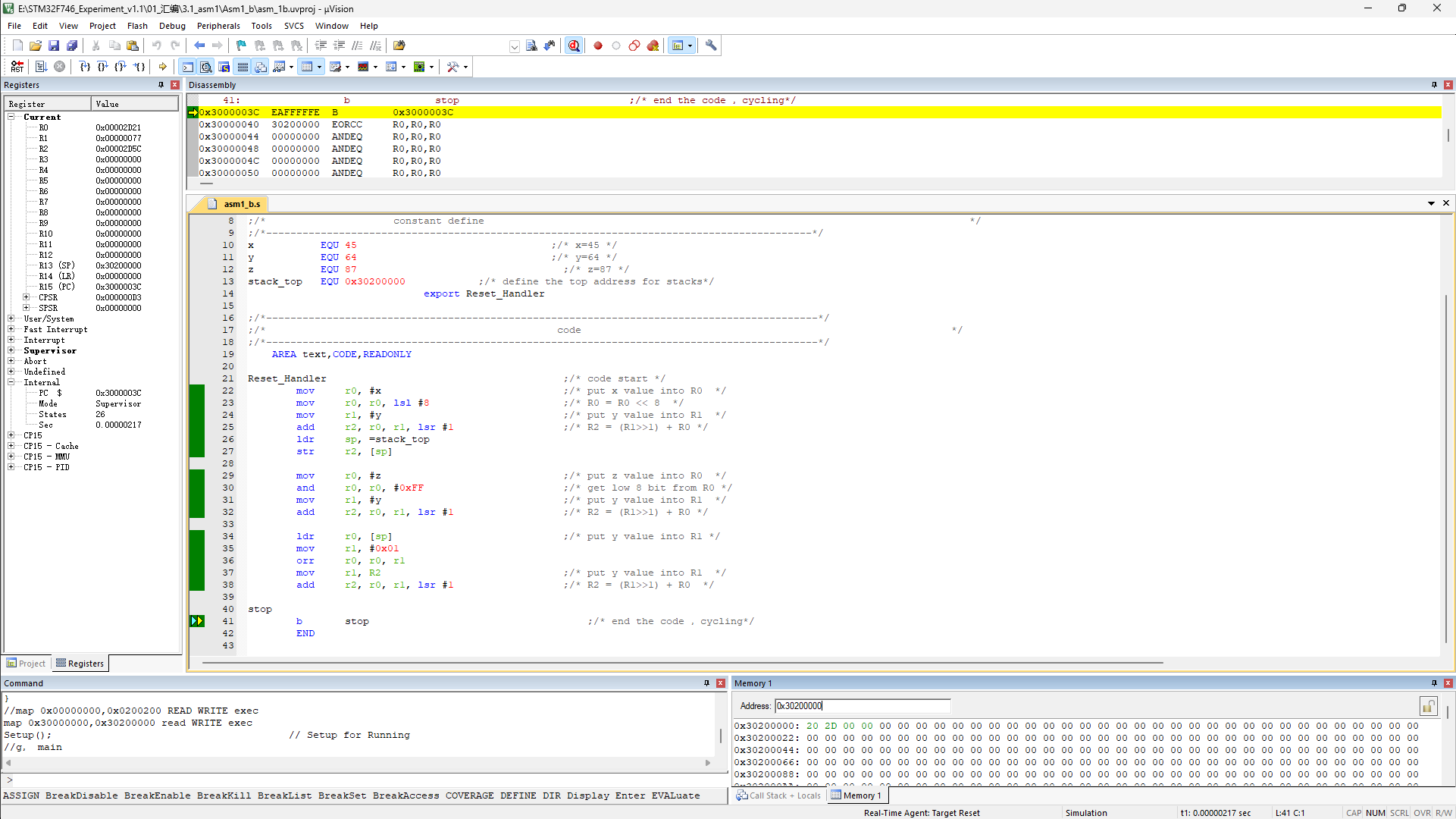
2)截图uVision5程序运行完毕时,寄存器窗口R0-R15的值,以及memory窗口中0x30200000位置处的值。
启动debug界面如下
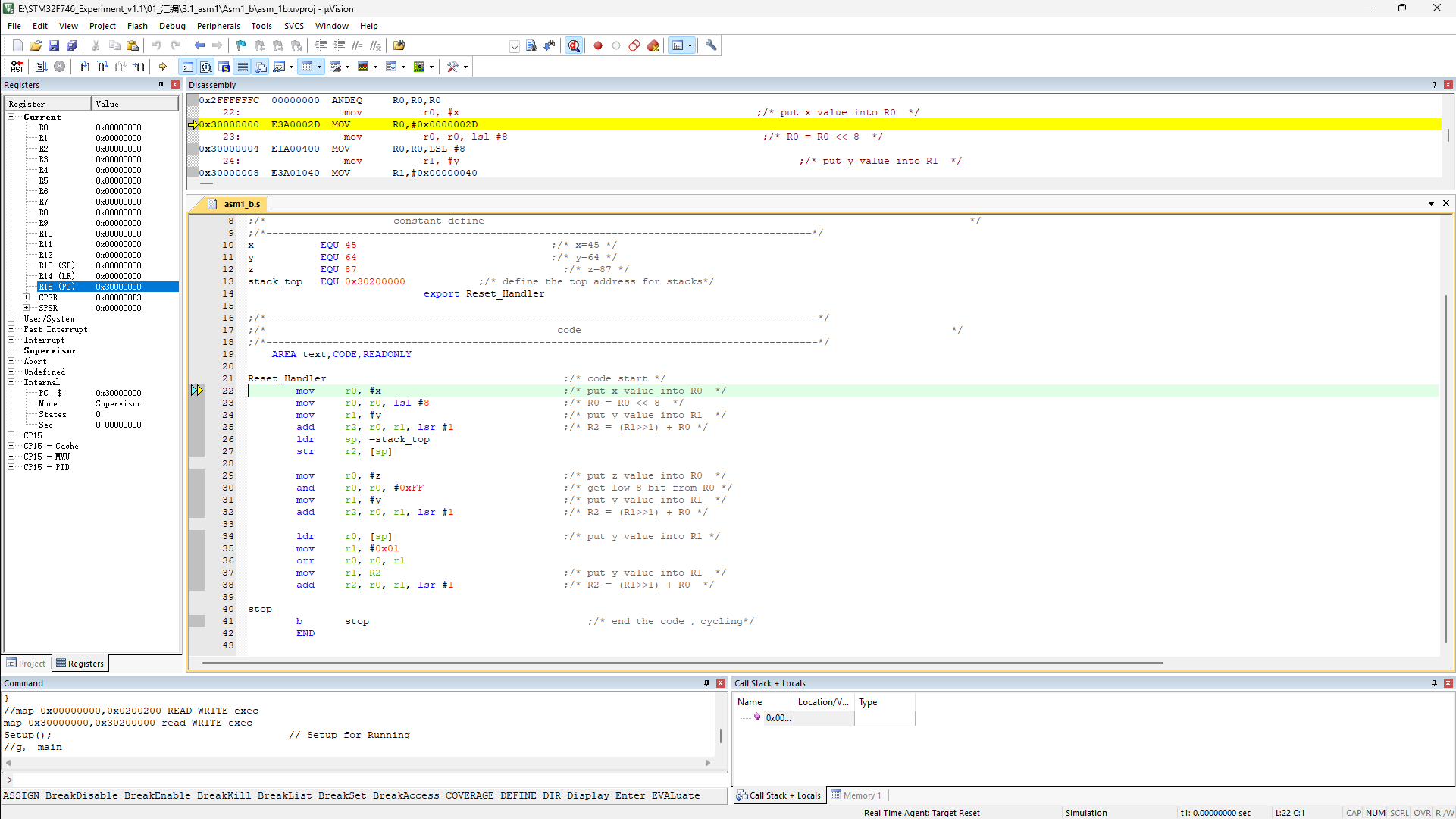
阅读代码,计算每行代码的目标寄存器的值。
;#********************************************************************************************
;# NAME: asm1_b.s *
;# Author: WUHAN R&D Center, Embest *
;# Desc: ARM instruction examples *
;# History: TianYunFang 2007.05.12 *
;#********************************************************************************************
;/*------------------------------------------------------------------------------------------*/
;/* constant define */
;/*------------------------------------------------------------------------------------------*/
x EQU 45 ;/* x=45 */
y EQU 64 ;/* y=64 */
z EQU 87 ;/* z=87 */
stack_top EQU 0x30200000 ;/* define the top address for stacks*/
export Reset_Handler
;/*-------------------------------------------------------------------------------------------*/
;/* code */
;/*-------------------------------------------------------------------------------------------*/
AREA text,CODE,READONLY
Reset_Handler ;/* code start */
mov r0, #x ;/* R0=0x2D */
mov r0, r0, lsl #8 ;/* R0=0x2D00 */
mov r1, #y ;/* R1=0x40 */
add r2, r0, r1, lsr #1 ;/* R2=0x2D20 */
ldr sp, =stack_top ;/* SP=0x30200000 */
str r2, [sp]
mov r0, #z ;/* R0=0x57 */
and r0, r0, #0xFF ;/* R0=0x57 */
mov r1, #y ;/* R1=0x40 */
add r2, r0, r1, lsr #1 ;/* R2=0x77 */
ldr r0, [sp] ;/* R1=0x40 */
mov r1, #0x01 ;/* R1=0x01 */
orr r0, r0, r1 ;/* R0=0x2D21
mov r1, R2 ;/* R1=0x77 */
add r2, r0, r1, lsr #1 ;/* R2=0x2D5C */
stop
b stop ;/* end the code £¬cycling*/
END
截图uVision5程序运行完毕
第五次作业
阅读发布的Um_s3c2410.pdf开发手册,回答如下问题
对于I/O端口操作需求,假设GPB0端口连接了一个按键,我需要读按键的值。
至少需要操作哪两个寄存器,对应的地址是多少
搜索“GPB0”,找到寄存器名和地址
需要以下两个寄存器
- GPBCON寄存器,寄存器的地址为0x56000010
- GPBDAT寄存器,寄存器的地址为0x56000014
需要操作这两个寄存器的哪几个bit位,如何操作
提示:例如 传感器GP****[0:1]=00,按键值=GP***[*]
- 寄存器GPBCON[1:0]=01
- 按键值=GPBDAT[0]
解释下列寄存器的含义以及地址
ADCCON
含义:ADC控制寄存器。这个寄存器用于控制模拟到数字转换器(ADC)的配置和操作。它可能包含启动ADC转换、选择输入通道、设置采样率等选项。
地址:0x58000000
WTCON
含义:看门狗定时器控制寄存器。这个寄存器用于配置和控制看门狗定时器的操作。看门狗定时器是一种硬件计时器,用于监控系统的正常运行。如果系统在一定时间内没有响应,看门狗定时器会触发一个复位或其他动作。
地址:0x53000000
SPPIN0
含义:串行端口引脚输入控制寄存器。这个寄存器用于控制与串行通信相关的引脚输入。它可能包含配置串行端口的输入方向、输入缓冲区等功能。
地址:0x59000008
BWSCON
含义:总线宽度和存储空间大小控制寄存器。这个寄存器用于配置系统的总线宽度和存储空间的大小。它可能包含设置数据总线宽度、地址空间大小等选项。
地址:0x48000000
BANKSIZE
含义:存储体大小寄存器。这个寄存器用于确定存储器的组织方式和大小。它可能包含设置存储体的行数、列数等参数,以确定存储器的容量和访问方式。
地址:0x48000028
结合STM32F746_Experiment_v1.1\01_汇编\common\src\2410init.s和sys_init.c\interrupts_init()。进行程序分析。
分析sys_init.c\debug_swi()函数的执行效果。代码+注释的方式。
void debug_swi(void)
{
uart_printf("!!!Enter SWI exception. %d\r\n", nCNT+=1); //将字符串"!!!Enter SWI exception. %d\r\n"打印到串口输出。其中,%d是一个占位符,用于显示变量nCNT的值
break_point(); //调用break_point()函数,进入中断
}这个函数是进入软件中断SWI的一个函数,并呈现当前的中断状态
看一下break_point()函数
void break_point(void)
{
int i;
char m = 200;
uart_printf("!!!Enter break point."); //将字符串"!!!Enter break point."打印到串口输出
rGPFCON=0x5500; //PORTF7/6/5/4 OUTPUT,配置端口F7、F6、F5和F4为输出模式
rGPFUP=0; //PULL-UP ENABLE ,启用上拉电阻
while(m) {
rGPFDAT=0; //将寄存器rGPFDAT的值设置为0
beep(1); //调用beep(1)函数发出声音
for(i=0;i<20000;i++); //通过一个空循环进行延时
rGPFDAT=0xF0; //将寄存器GPFDAT的值设置为0xF0
beep(0); //调用beep(0)函数停止声音
for(i=0;i<20000;i++);//再次通过一个空循环进行延时
m--;
}//当m的值减到0时,退出循环
}进入断点时通过控制GPIO端口F7、F6、F5和F4来产生声音信号
分析2410init.s和2410init.s,并结合课上内容,以EINT3中断(设定为IRQ)为例,说清楚跳中断是如何传入ARM,并最终被执行的,可截取关键代码进行注释描述。
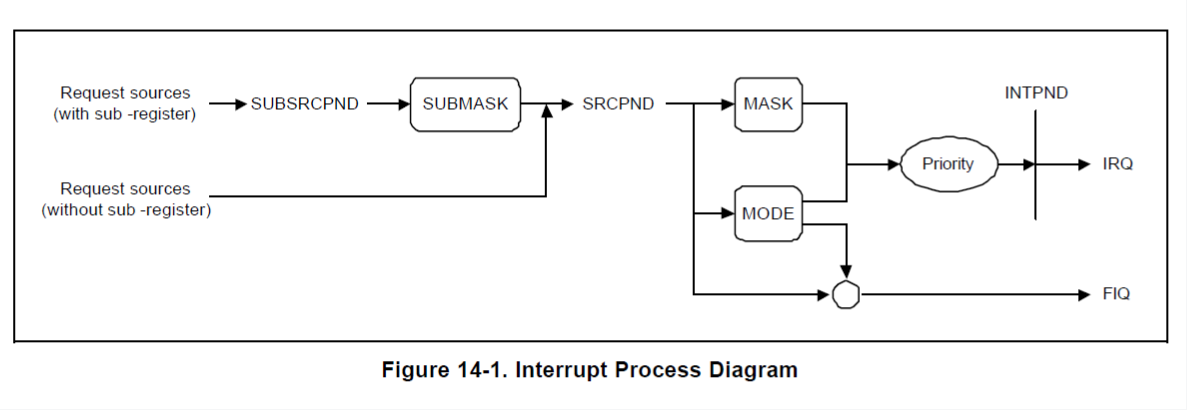
- 请求源(带有子寄存器):这表示有中断请求的源,并且这些源有关联的子寄存器。
- SUBSRCPND:子源挂起寄存器,记录了哪些中断源发出了中断请求。
- SUBMASK:子掩码寄存器,用于决定哪些子中断源可以影响主中断挂起状态。
- SRCPND:源挂起寄存器,记录了当前哪些中断源发出了中断请求。
- MASK:掩码寄存器,用于控制是否允许对应的中断源产生中断信号。
- MODE:模式选择,可能用于选择不同的中断处理模式。
- INTPND:中断挂起,显示了当前正在等待处理的中断。
- 优先级:此处可能涉及优先级逻辑,以决定哪个中断信号将被优先处理。
- IRQ:常规中断请求,处理普通优先级的中断。
- FIQ:快速中断请求,处理高优先级的中断
中断信号的行进路线:
- 中断源发出中断请求
- 这个请求被记录在SUBSRCPND或SRCPND中,取决于是否带有子寄存器。
- 通过SUBMASK和MASK控制这些请求是否会被允许影响处理器状态。
- 如果不允许中断,中断信号被挂起
- 如果允许,中断请求信号就会基于优先级逻辑产生一个中断,要么是常规的IRQ,要么是快速的FIQ。
在sys_init.c\interrupts_init()中看到
pISR_EINT3 = (unsigned) break_point;这里是初始化中断服务程序
当外部事件(如按键按下、传感器触发等)发生时,它会通过GPIO(通用输入输出)或其他外部中断线路触发EINT3。
.equ HandleEINT3, _ISR_STARTADDRESS+4*11设定为IRQ
查询到
HandlerIRQ HANDLER HandleIRQ搜索宏HANDLER,并阅读宏定义
.macro HANDLER HandleLabel
sub sp,sp,#4 /* 减去sp的值(以存储跳转地址) */
stmfd sp!,{r0} /* 将工作寄存器r0压栈(lr不压栈,因为它返回到原始地址) */
ldr r0,=\HandleLabel /* 将HandleXXX的地址加载到r0 */
ldr r0,[r0] /* 加载HandleXXX的内容(服务例程的起始地址)到r0 */
str r0,[sp,#4] /* 将HandleXXX的内容(ISR)存储到栈上 */
ldmfd sp!,{r0,pc} /* 从栈中弹出工作寄存器和程序计数器pc(跳转到ISR) */
.endmMACRO
$HandlerLabel HANDLER $HandleLabel
$HandlerLabel
sub sp,sp,#4 ;decrement sp(to store jump address)
stmfd sp!,{r0} ;PUSH the work register to stack(lr does not push because it return to original address)
ldr r0,=$HandleLabel;load the address of HandleXXX to r0
ldr r0,[r0] ;load the contents(service routine start address) of HandleXXX
str r0,[sp,#4] ;store the contents(ISR) of HandleXXX to stack
ldmfd sp!,{r0,pc} ;POP the work register and pc(jump to ISR)
MEND在_ISR_STARTADDRESS=0x33FF_FF00里定义的第一级中断向量表是采用型如Handle***的方式的
而在程序的ENTRY处(程序开始处)采用的是b Handler***的方式
在这里Handler***就是通过HANDLER这个宏和Handle***建立联系的
然后跳转到位于0x18处的统一中断函数中该函数通过读取interrupt pending寄存器中对应标志位 来判断中断源 并根据优先级关系再跳到对应中断源的处理代码中
我们要处理的就是IRQ
下面这段程序是用来处理非向量中断(EINT3),具体判断I_ISPR中各位是否置1 置1表示目前此中断等待响应(每次只能有一位置1),从最高优先级中断位开始判断,检测到等待服务中断就将pc置为中断服务函数首地址
IsrIRQ
sub sp,sp,#4 ; 为PC(程序计数器)保留空间
stmfd sp!,{r8-r9} ; 将r8和r9寄存器压栈保存
ldr r9,=INTOFFSET ; 将INTOFFSET的地址加载到r9
ldr r9,[r9] ; 加载INTOFFSET的内容到r9,这可能是一个中断向量偏移量
ldr r8,=HandleEINT0 ; 将HandleEINT0的地址加载到r8
add r8,r8,r9,lsl #2 ; 将r8和r9的值相加,r9左移两位,得到具体的中断处理函数地址
ldr r8,[r8] ; 加载r8指向的地址中的值,即中断处理函数的入口地址
str r8,[sp,#8] ; 将中断处理函数的入口地址存储到栈上,位置是sp+8
ldmfd sp!,{r8-r9,pc} ; 从栈中弹出r8, r9和pc,并将pc设置为中断处理函数的入口地址,跳转到中断处理函数
LTORG这里需要将当前pc进栈,然后将pc的地址赋给EINT3的首地址,即_ISR_STARTADDRESS+4*11
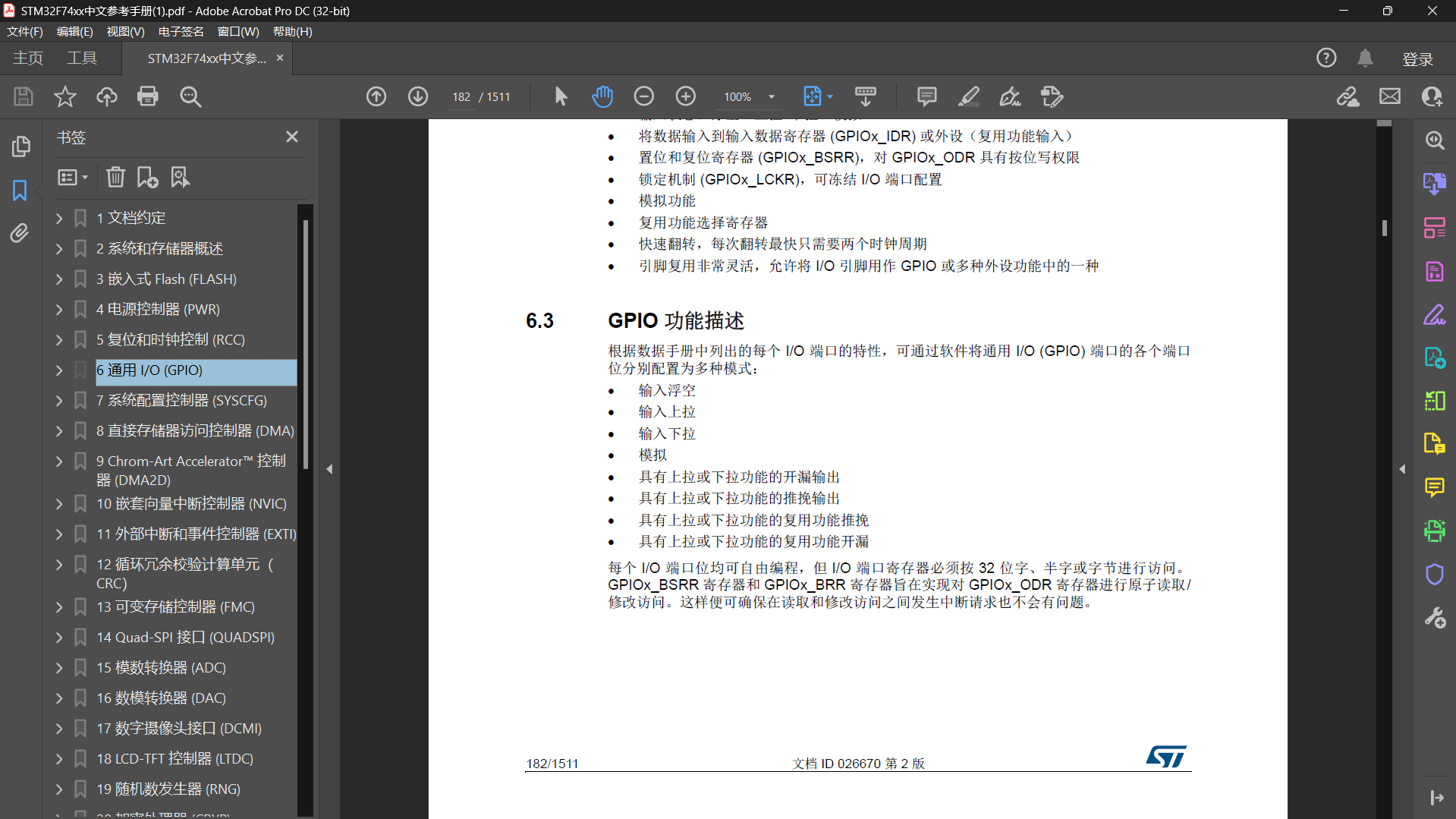
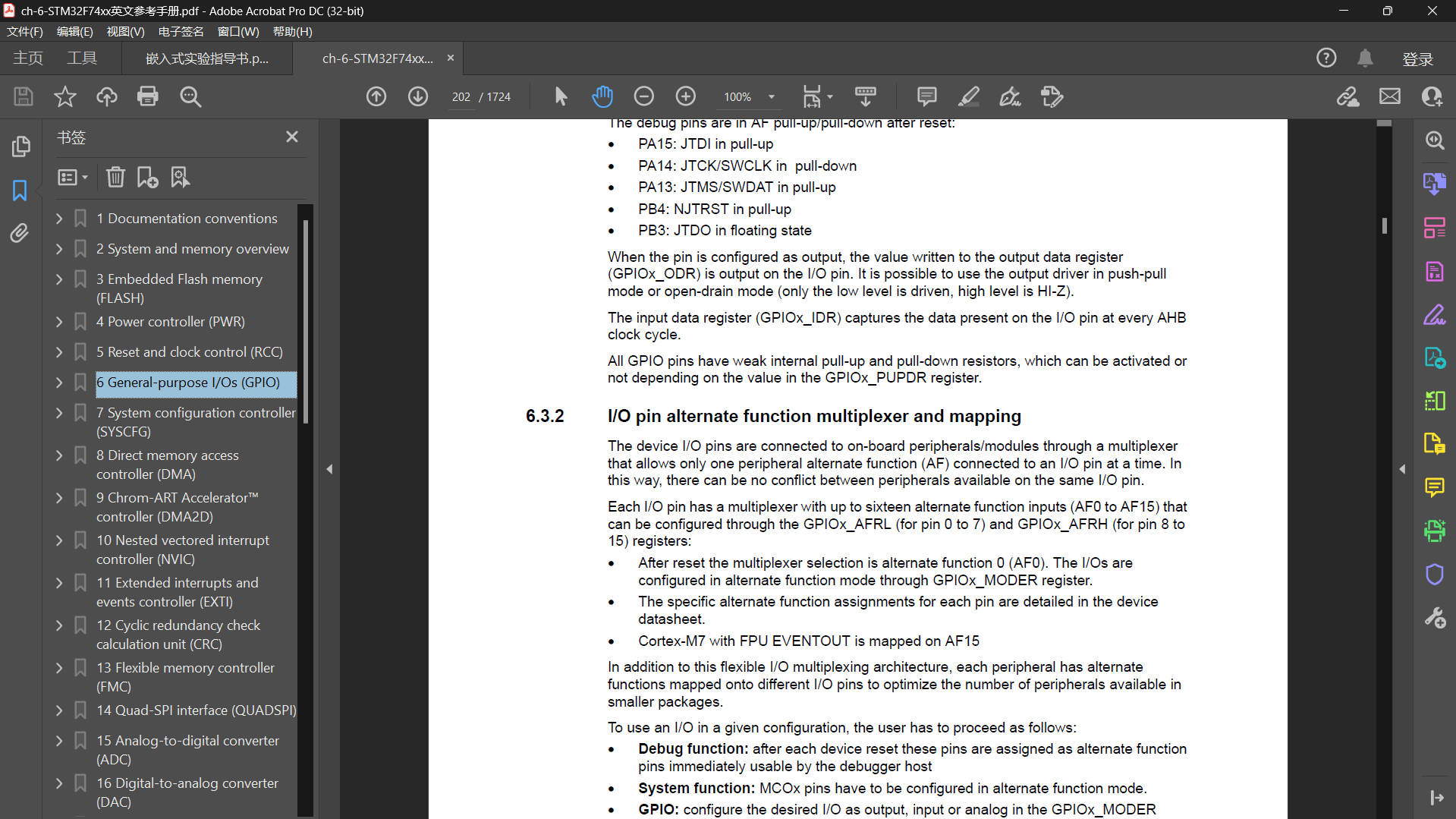
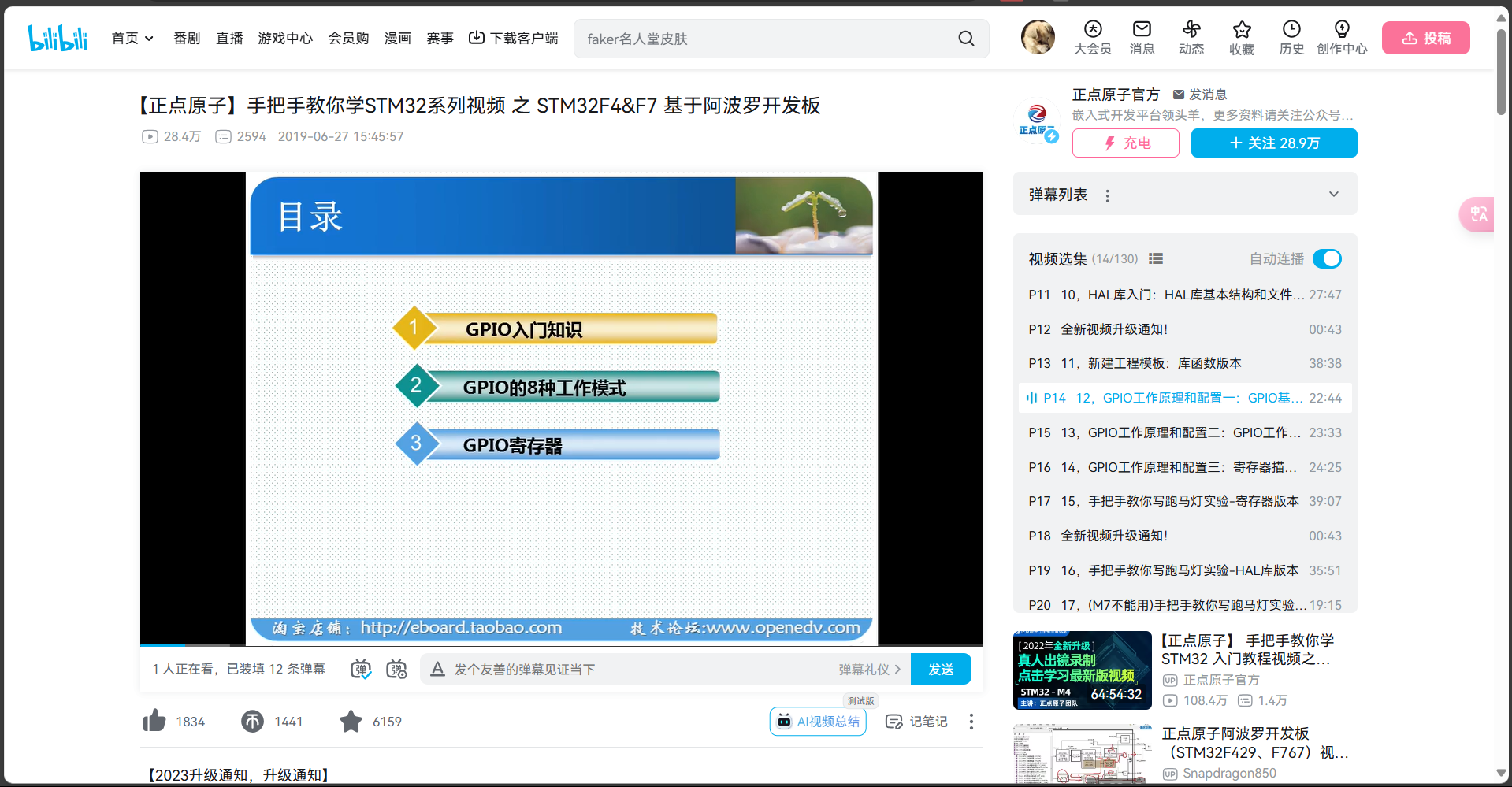
以实验包中“STM32F746_Experiment_v1.1\02_GPIO”例程为例子,描述STM32系列嵌入式系统的启动过程(如何调用到main函数的,之前经过了哪些初始化工作)。
参考资料如下:
STM32F74xx中文参考手册(1).pdf (STM32F746_Experiment_v1.1目录下)
上课讲课的PPT
自行网上搜索。例如:https://blog.csdn.net/luobeihai/article/details/117595762
设置栈和堆的信息
栈
Stack_Size EQU 0x00000400
AREA STACK, NOINIT, READWRITE, ALIGN=3
Stack_Mem SPACE Stack_Size
__initial_sp开辟栈的大小为 0X00000400(1KB),栈的作用是用于局部变量、函数调用、函数形参等的开销;标号__initial_sp紧挨着 SPACE 语句放置,表示栈的结束地址,即栈顶地址。
堆
Heap_Size EQU 0x00000200
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base
Heap_Mem SPACE Heap_Size
__heap_limit
PRESERVE8
THUMB开辟堆的大小为 0X00000200(512 字节),heap_base 表示堆的起始地址, heap_limit 表示堆的结束地址。堆主要用来动态内存的分配。
定义中断向量表
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
DCD MemManage_Handler ; MPU Fault Handler
DCD BusFault_Handler ; Bus Fault Handler
DCD UsageFault_Handler ; Usage Fault Handler
......ARM 规定向量表的起始位置存放的是栈顶指针 MSP 的地址值,紧接着存放的是复位中断入口函数的地址。当刚上电的时候,硬件会根据向量表的地址找到向量表的具体位置(对于向量表的地址是可以通过 NVIC 中的一个重定位寄存器来设置的,复位时该寄存器的值为0),然后会根据向量表中的这两个数据,设置 SP、PC 的值,这时 CPU 就会从复位中断的入口函数开始取指令运行程序。
调用SystemInit函数,设置系统时钟
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT __main
IMPORT SystemInit
LDR R0, =SystemInit
BLX R0 ; 调用SystemInit函数
LDR R0, =__main
BX R0
ENDP硬件设置好了 SP、PC 的值后,这时CPU 会从 Reset_Handler 处开始取指令运行,首先会调用 SystemInit 函数来初始化系统时钟,该函数是官方固件库提供的一个库函数,在 system_stm32f7xx.c 文件中定义如下:
void SystemInit(void)
{
/* FPU settings */
#if (__FPU_PRESENT == 1) && (__FPU_USED == 1)
SCB->CPACR |= ((3UL << 10*2)|(3UL << 11*2)); /* set CP10 and CP11 Full Access */
#endif
/* Reset the RCC clock configuration to the default reset state */
/* Set HSION bit */
RCC->CR |= (uint32_t)0x00000001;
/* Reset CFGR register */
RCC->CFGR = 0x00000000;
/* Reset HSEON, CSSON and PLLON bits */
RCC->CR &= (uint32_t)0xFEF6FFFF;
/* Reset PLLCFGR register */
RCC->PLLCFGR = 0x24003010;
/* Reset HSEBYP bit */
RCC->CR &= (uint32_t)0xFFFBFFFF;
/* Disable all interrupts */
RCC->CIR = 0x00000000;
#if defined (DATA_IN_ExtSRAM) || defined (DATA_IN_ExtSDRAM)
SystemInit_ExtMemCtl();
#endif /* DATA_IN_ExtSRAM || DATA_IN_ExtSDRAM */
/* Configure the Vector Table location add offset address */
#ifdef VECT_TAB_SRAM
SCB->VTOR = SRAM1_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal SRAM */
#else
SCB->VTOR = FLASH_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal FLASH */
#endif
}该函数完成以下功能:
- FPU 设置部分:如果芯片支持 FPU(浮点运算器),则设置 CP10 和 CP11 为完全访问权限。
- RCC 时钟配置部分:将芯片的 RCC 寄存器设置为默认值。具体步骤包括:
- 打开 HSION(内部高速时钟)位。
- 重置 CFGR 寄存器为 0;
- 关闭 HSEON(外部高速时钟)、CSSON(时钟安全系统)和 PLLON(锁相环)位;
- 将 PLLCFGR 寄存器重置为默认值;
- 关闭 HSEBYP(外部高速时钟旁路)位;
- 禁用所有中断。
- 外部存储器部分:如果使用外部存储器(如外部 SRAM 或 SDRAM),则调用 SystemInit_ExtMemCtl() 函数进行配置。
- 向量表位置部分:根据宏定义的设置,将向量表位置设置为内部 SRAM 或内部 FLASH。
调用__main函数
__main 函数是系统自带的库函数
接下来就跳转到了 __scatterload 函数,从函数名可以看出这是一个分散加载函数,该函数主要实现的功能就是数据段的重定位和清除 bss 段,初始化栈空间。
调用main函数
scatterload 函数最后调用了 main_after_scatterload 函数,这个函数实现的功能就是跳转到了用户的 main 函数,进入到用户程序。__main_after_scatterload 函数的代码如下:
__main_after_scatterload
_main_clock
_main_cpp_init
_main_init
0x08000138: 4800 .H LDR r0,[pc,#0] ; [0x800013c] = 0x80004c1
0x0800013a: 4700 .G BX r0可以看出,代码最后跳转到了 r0 寄存器所指示的地址中去了,实际上这个地址就是用户的 main 函数地址。由此完成 STM32 的启动过程,接下来运行的是用户程序的代码。
第六次作业
自学工作
以main.c函数为代码起点,通过向内层代码跳转(CTRL + 鼠标左键),弄清楚整个代码的执行流程(截图分析执行流程)。
int main(void)
{
System_Init();
/* Initialize LED1 mounted on board */
BSP_LED_Init(LED1);
/* Configure EXTI15_10 (connected to PC.13 pin) in interrupt mode */
EXTI15_10_IRQHandler_Config();
while (1)
{
}
}上述是main.c中的main函数,
首先调用
System_Init()函数进行系统初始化,跳转到对应界面得到的是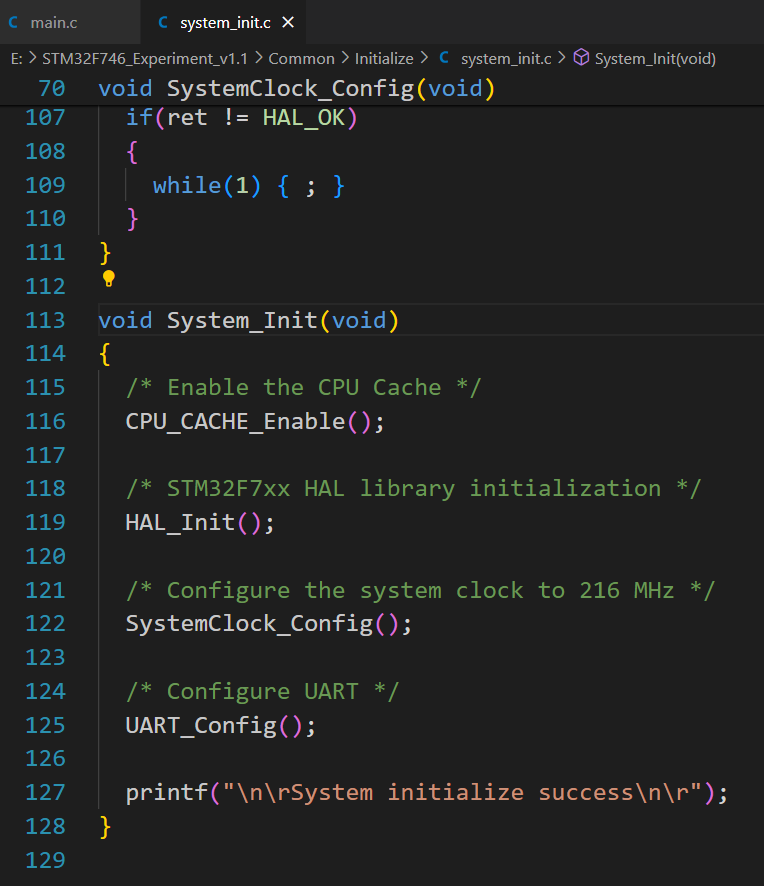
void System_Init(void) { /* Enable the CPU Cache */ CPU_CACHE_Enable(); // 启用CPU缓存以提高系统性能 /* STM32F7xx HAL library initialization */ HAL_Init(); // 初始化STM32F7系列的HAL库,配置系统级的硬件抽象层 /* Configure the system clock to 216 MHz */ SystemClock_Config(); // 配置系统时钟为216 MHz,确保系统以正确的频率运行 /* Configure UART */ UART_Config(); // 配置UART通信接口,初始化串口通信 printf("\n\rSystem initialize success\n\r"); // 打印系统初始化成功的信息 }调用了四个函数初始化嵌入式系统,这里不具体展开系统初始化的函数
接下来初始化指定的LED,在这里我们初始化的是LED1
void BSP_LED_Init(Led_TypeDef Led) { GPIO_InitTypeDef gpio_init_structure; // 定义一个GPIO初始化结构体 GPIO_TypeDef* gpio_led; // 定义一个指向GPIO端口的指针 // 实际上这里只有一个LED被初始化 switch(Led) { case LED1: /* 启用LED1的GPIO时钟 */ LED1_GPIO_CLK_ENABLE(); gpio_led = LED1_GPIO_PORT; // 指向LED1的GPIO端口 break; case LED2: /* 启用LED2的GPIO时钟 */ LED2_GPIO_CLK_ENABLE(); gpio_led = LED2_GPIO_PORT; // 指向LED2的GPIO端口 break; case LED3: /* 启用LED3的GPIO时钟 */ LED3_GPIO_CLK_ENABLE(); gpio_led = LED3_GPIO_PORT; // 指向LED3的GPIO端口 break; case LED4: /* 启用LED4的GPIO时钟 */ LED4_GPIO_CLK_ENABLE(); gpio_led = LED4_GPIO_PORT; // 指向LED4的GPIO端口 break; default: break; } /* 配置GPIO_LED引脚 */ gpio_init_structure.Pin = GPIO_PIN[Led]; // 设置GPIO引脚编号 gpio_init_structure.Mode = GPIO_MODE_OUTPUT_PP; // 设置GPIO模式为推挽输出 gpio_init_structure.Pull = GPIO_PULLUP; // 设置GPIO上拉 gpio_init_structure.Speed = GPIO_SPEED_HIGH; // 设置GPIO速度为高 HAL_GPIO_Init(gpio_led, &gpio_init_structure); // 初始化GPIO /* 默认情况下,关闭LED */ HAL_GPIO_WritePin(gpio_led, GPIO_PIN[Led], GPIO_PIN_SET); // 设置GPIO引脚为高电平,关闭LED }我们这里初始化了LED1,所以在函数中只执行case LED1,引脚编号也是设置的LED1
继续跳转
#define LED1_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()#define __HAL_RCC_GPIOA_CLK_ENABLE() do { \ __IO uint32_t tmpreg = 0x00; \ SET_BIT(RCC->AHB1ENR, RCC_AHB1ENR_GPIOAEN);\ /* Delay after an RCC peripheral clock enabling */ \ tmpreg = READ_BIT(RCC->AHB1ENR, RCC_AHB1ENR_GPIOAEN);\ UNUSED(tmpreg); \ } while(0)用于在嵌入式系统中启用 GPIOA 的时钟。该宏定义了一段代码块,用于设置与验证 RCC(复位与时钟控制)外设的 AHB1 外设时钟使能寄存器 (AHB1ENR) 中的 GPIOA 使能位 (GPIOAEN)。
配置连接到PC13引脚的外部中断
/* * Configures EXTI lines 15 to 10 (connected to PC.13 pin) in interrupt mode */ void EXTI15_10_IRQHandler_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; /* Enable GPIOC clock */ __HAL_RCC_GPIOC_CLK_ENABLE(); // 使能GPIOC时钟 /* Configure PC.13 pin as input floating */ GPIO_InitStructure.Mode = GPIO_MODE_IT_FALLING; // 设置PC13引脚为下降沿触发中断 GPIO_InitStructure.Pull = GPIO_NOPULL; // 配置GPIO引脚无内部上拉或下拉 GPIO_InitStructure.Pin = GPIO_PIN_13; HAL_GPIO_Init(GPIOC, &GPIO_InitStructure); // 初始化PC13引脚配置 /* Enable and set EXTI lines 15 to 10 Interrupt to the lowest priority */ HAL_NVIC_SetPriority(EXTI15_10_IRQn, 2, 0); // 设置EXTI15_10中断优先级为2 HAL_NVIC_EnableIRQ(EXTI15_10_IRQn); // 使能EXTI15_10中断 }- 使能GPIOC外设时钟,以便使用PC.13引脚。
- 配置PC.13引脚为下降沿触发的中断模式,无内部上拉或下拉。
- 设置并使能EXTI15_10中断,优先级设置为2(相对较低的优先级)
以源码和注释的形式,讲解代码的执行流程,重点是描述下面函数内代码的执行与配置原理(讲解关键语句即可)
System_Init()\UART_Config()
void UART_Config(void)
{
/* 配置UART外设 */
/* 将USART外设设置为异步模式(UART模式) */
/* UART配置如下:
- 字长 = 8位
- 停止位 = 1个停止位
- 奇偶校验 = 无校验
- 波特率 = 115200波特
- 硬件流控制禁用(RTS和CTS信号) */
// 设置USART实例
UartHandle.Instance = USARTx;
// 设置波特率为115200
UartHandle.Init.BaudRate = 115200;
// 设置字长为8位
UartHandle.Init.WordLength = UART_WORDLENGTH_8B;
// 设置停止位为1个停止位
UartHandle.Init.StopBits = UART_STOPBITS_1;
// 设置无奇偶校验
UartHandle.Init.Parity = UART_PARITY_NONE;
// 禁用硬件流控制
UartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
// 设置UART模式为发送和接收
UartHandle.Init.Mode = UART_MODE_TX_RX;
// 初始化UART
HAL_UART_Init(&UartHandle);
}
具体配置包括波特率、字长、停止位、奇偶校验、硬件流控制和模式等参数,然后将参数实例传入初始化函数进行初始化
System_Init()\UART_Config()\HAL_UART_Init()
HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart)
{
/* 检查 UART 句柄是否分配 */
if(huart == NULL)
{
return HAL_ERROR;
}
if(huart->Init.HwFlowCtl != UART_HWCONTROL_NONE)
{
/* 检查硬件流控制参数 */
assert_param(IS_UART_HWFLOW_INSTANCE(huart->Instance));
}
else
{
/* 检查 UART 实例参数 */
assert_param(IS_UART_INSTANCE(huart->Instance));
}
if(huart->State == HAL_UART_STATE_RESET)
{
/* 分配锁资源并初始化 */
huart->Lock = HAL_UNLOCKED;
/* 初始化底层硬件:GPIO,时钟 */
HAL_UART_MspInit(huart);
}
/* 设置 UART 状态为忙 */
huart->State = HAL_UART_STATE_BUSY;
/* 禁用外设 */
__HAL_UART_DISABLE(huart);
/* 设置 UART 通信参数 */
if (UART_SetConfig(huart) == HAL_ERROR)
{
return HAL_ERROR;
}
/* 如果需要高级特性初始化,则配置 */
if (huart->AdvancedInit.AdvFeatureInit != UART_ADVFEATURE_NO_INIT)
{
UART_AdvFeatureConfig(huart);
}
/* 在异步模式下,必须清除以下位:
- USART_CR2 寄存器中的 LINEN 和 CLKEN 位,
- USART_CR3 寄存器中的 SCEN、HDSEL 和 IREN 位 */
huart->Instance->CR2 &= ~(USART_CR2_LINEN | USART_CR2_CLKEN);
huart->Instance->CR3 &= ~(USART_CR3_SCEN | USART_CR3_HDSEL | USART_CR3_IREN);
/* 启用外设 */
__HAL_UART_ENABLE(huart);
/* 在将 huart->State 设置为就绪之前检查 TEACK 和/或 REACK */
return (UART_CheckIdleState(huart));
}BSP_LED_Init()
void BSP_LED_Init(Led_TypeDef Led)
{
GPIO_InitTypeDef gpio_init_structure;
GPIO_TypeDef* gpio_led;
// 根据传入的LED类型初始化相应的GPIO端口
switch(Led)
{
case LED1:
/* 使能LED1的GPIO时钟 */
LED1_GPIO_CLK_ENABLE();
gpio_led = LED1_GPIO_PORT;
break;
case LED2:
/* 使能LED2的GPIO时钟 */
LED2_GPIO_CLK_ENABLE();
gpio_led = LED2_GPIO_PORT;
break;
case LED3:
/* 使能LED3的GPIO时钟 */
LED3_GPIO_CLK_ENABLE();
gpio_led = LED3_GPIO_PORT;
break;
case LED4:
/* 使能LED4的GPIO时钟 */
LED4_GPIO_CLK_ENABLE();
gpio_led = LED4_GPIO_PORT;
break;
default:
break;
}
// 配置GPIO端口
gpio_init_structure.Pin = GPIO_PIN[Led]; // 设置引脚号
gpio_init_structure.Mode = GPIO_MODE_OUTPUT_PP; // 设置引脚为推挽输出模式
gpio_init_structure.Pull = GPIO_PULLUP; // 设置引脚上拉
gpio_init_structure.Speed = GPIO_SPEED_HIGH; // 设置引脚速度为高
// 初始化GPIO
HAL_GPIO_Init(gpio_led, &gpio_init_structure);
// 默认关闭LED
HAL_GPIO_WritePin(gpio_led, GPIO_PIN[Led], GPIO_PIN_SET);
}
BSP_LED_Init()\HAL_GPIO_Init()
/*
* 函数名:HAL_GPIO_Init
* 参数:
* - GPIOx:GPIO端口指针,表示要初始化的GPIO端口
* - GPIO_Init:GPIO初始化结构体指针,包含了GPIO初始化的各项参数
* 返回值:无
* 功能:初始化指定GPIO端口的各项配置
*/
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
{
uint32_t position = 0x00;
uint32_t ioposition = 0x00;
uint32_t iocurrent = 0x00;
uint32_t temp = 0x00;
/* 检查参数的有效性 */
assert_param(IS_GPIO_ALL_INSTANCE(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Init->Pin));
assert_param(IS_GPIO_MODE(GPIO_Init->Mode));
assert_param(IS_GPIO_PULL(GPIO_Init->Pull));
/* 配置端口引脚 */
for(position = 0; position < GPIO_NUMBER; position++)
{
/* 获取引脚位置 */
ioposition = ((uint32_t)0x01) << position;
/* 获取当前引脚位置的值 */
iocurrent = (uint32_t)(GPIO_Init->Pin) & ioposition;
if(iocurrent == ioposition)
{
/*--------------------- 配置GPIO模式 ------------------------*/
/* 如果选择了复用功能模式 */
if((GPIO_Init->Mode == GPIO_MODE_AF_PP) || (GPIO_Init->Mode == GPIO_MODE_AF_OD))
{
/* 检查复用功能参数的有效性 */
assert_param(IS_GPIO_AF(GPIO_Init->Alternate));
/* 配置当前IO的复用功能 */
temp = GPIOx->AFR[position >> 3];
temp &= ~((uint32_t)0xF << ((uint32_t)(position & (uint32_t)0x07) * 4)) ;
temp |= ((uint32_t)(GPIO_Init->Alternate) << (((uint32_t)position & (uint32_t)0x07) * 4));
GPIOx->AFR[position >> 3] = temp;
}
/* 配置IO方向模式(输入、输出、复用或模拟) */
temp = GPIOx->MODER;
temp &= ~(GPIO_MODER_MODER0 << (position * 2));
temp |= ((GPIO_Init->Mode & GPIO_MODE) << (position * 2));
GPIOx->MODER = temp;
/* 如果选择了输出或复用功能模式 */
if((GPIO_Init->Mode == GPIO_MODE_OUTPUT_PP) || (GPIO_Init->Mode == GPIO_MODE_AF_PP) ||
(GPIO_Init->Mode == GPIO_MODE_OUTPUT_OD) || (GPIO_Init->Mode == GPIO_MODE_AF_OD))
{
/* 检查速度参数的有效性 */
assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));
/* 配置IO速度 */
temp = GPIOx->OSPEEDR;
temp &= ~(GPIO_OSPEEDER_OSPEEDR0 << (position * 2));
temp |= (GPIO_Init->Speed << (position * 2));
GPIOx->OSPEEDR = temp;
/* 配置IO输出类型 */
temp = GPIOx->OTYPER;
temp &= ~(GPIO_OTYPER_OT_0 << position) ;
temp |= (((GPIO_Init->Mode & GPIO_OUTPUT_TYPE) >> 4) << position);
GPIOx->OTYPER = temp;
}
/* 激活当前IO的上拉或下拉电阻 */
temp = GPIOx->PUPDR;
temp &= ~(GPIO_PUPDR_PUPDR0 << (position * 2));
temp |= ((GPIO_Init->Pull) << (position * 2));
GPIOx->PUPDR = temp;
/*--------------------- 配置外部中断模式 ------------------------*/
/* 配置当前IO的外部中断或事件 */
if((GPIO_Init->Mode & EXTI_MODE) == EXTI_MODE)
{
/* 使能SYSCFG时钟 */
__HAL_RCC_SYSCFG_CLK_ENABLE();
temp = SYSCFG->EXTICR[position >> 2];
temp &= ~(((uint32_t)0x0F) << (4 * (position & 0x03)));
temp |= ((uint32_t)(GPIO_GET_INDEX(GPIOx)) << (4 * (position & 0x03)));
SYSCFG->EXTICR[position >> 2] = temp;
/* 清除外部中断线配置 */
temp = EXTI->IMR;
temp &= ~((uint32_t)iocurrent);
if((GPIO_Init->Mode & GPIO_MODE_IT) == GPIO_MODE_IT)
{
temp |= iocurrent;
}
EXTI->IMR = temp;
temp = EXTI->EMR;
temp &= ~((uint32_t)iocurrent);
if((GPIO_Init->Mode & GPIO_MODE_EVT) == GPIO_MODE_EVT)
{
temp |= iocurrent;
}
EXTI->EMR = temp;
/* 清除上升沿下降沿触发配置 */
temp = EXTI->RTSR;
temp &= ~((uint32_t)iocurrent);
if((GPIO_Init->Mode & RISING_EDGE) == RISING_EDGE)
{
temp |= iocurrent;
}
EXTI->RTSR = temp;
temp = EXTI->FTSR;
temp &= ~((uint32_t)iocurrent);
if((GPIO_Init->Mode & FALLING_EDGE) == FALLING_EDGE)
{
temp |= iocurrent;
}
EXTI->FTSR = temp;
}
}
}
}
BSP_LED_Init()\HAL_GPIO_WritePin()
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
{
/* 检查参数是否合法 */
assert_param(IS_GPIO_PIN(GPIO_Pin)); // 确认GPIO_Pin是有效的GPIO引脚
assert_param(IS_GPIO_PIN_ACTION(PinState)); // 确认PinState是有效的引脚状态(高电平或低电平)
if(PinState != GPIO_PIN_RESET) // 如果PinState不是低电平(即设置为高电平)
{
GPIOx->BSRR = GPIO_Pin; // 设置对应的GPIO引脚为高电平
}
else // 如果PinState是低电平
{
GPIOx->BSRR = (uint32_t)GPIO_Pin << 16; // 设置对应的GPIO引脚为低电平
}
}
EXTI15_10_IRQHandler_Config()
void EXTI15_10_IRQHandler_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 启用GPIOC时钟 */
__HAL_RCC_GPIOC_CLK_ENABLE();
/* 配置PC13引脚为输入浮空模式 */
GPIO_InitStructure.Mode = GPIO_MODE_IT_FALLING; // 中断触发方式:下降沿触发
GPIO_InitStructure.Pull = GPIO_NOPULL; // GPIO内部无上拉或下拉
GPIO_InitStructure.Pin = GPIO_PIN_13;
HAL_GPIO_Init(GPIOC, &GPIO_InitStructure); // 初始化PC13引脚
/* 启用并设置EXTI15到10线中断,优先级最低 */
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 2, 0); // 设置中断优先级
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn); // 开启中断
}
EXTI15_10_IRQHandler_Config()\HAL_GPIO_Init()
/*
* 函数名:HAL_GPIO_Init
* 参数:
* - GPIOx:GPIO端口指针,表示要初始化的GPIO端口
* - GPIO_Init:GPIO初始化结构体指针,包含了GPIO初始化的各项参数
* 返回值:无
* 功能:初始化指定GPIO端口的各项配置
*/
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
{
uint32_t position = 0x00;
uint32_t ioposition = 0x00;
uint32_t iocurrent = 0x00;
uint32_t temp = 0x00;
/* 检查参数的有效性 */
assert_param(IS_GPIO_ALL_INSTANCE(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Init->Pin));
assert_param(IS_GPIO_MODE(GPIO_Init->Mode));
assert_param(IS_GPIO_PULL(GPIO_Init->Pull));
/* 配置端口引脚 */
for(position = 0; position < GPIO_NUMBER; position++)
{
/* 获取引脚位置 */
ioposition = ((uint32_t)0x01) << position;
/* 获取当前引脚位置的值 */
iocurrent = (uint32_t)(GPIO_Init->Pin) & ioposition;
if(iocurrent == ioposition)
{
/*--------------------- 配置GPIO模式 ------------------------*/
/* 如果选择了复用功能模式 */
if((GPIO_Init->Mode == GPIO_MODE_AF_PP) || (GPIO_Init->Mode == GPIO_MODE_AF_OD))
{
/* 检查复用功能参数的有效性 */
assert_param(IS_GPIO_AF(GPIO_Init->Alternate));
/* 配置当前IO的复用功能 */
temp = GPIOx->AFR[position >> 3];
temp &= ~((uint32_t)0xF << ((uint32_t)(position & (uint32_t)0x07) * 4)) ;
temp |= ((uint32_t)(GPIO_Init->Alternate) << (((uint32_t)position & (uint32_t)0x07) * 4));
GPIOx->AFR[position >> 3] = temp;
}
/* 配置IO方向模式(输入、输出、复用或模拟) */
temp = GPIOx->MODER;
temp &= ~(GPIO_MODER_MODER0 << (position * 2));
temp |= ((GPIO_Init->Mode & GPIO_MODE) << (position * 2));
GPIOx->MODER = temp;
/* 如果选择了输出或复用功能模式 */
if((GPIO_Init->Mode == GPIO_MODE_OUTPUT_PP) || (GPIO_Init->Mode == GPIO_MODE_AF_PP) ||
(GPIO_Init->Mode == GPIO_MODE_OUTPUT_OD) || (GPIO_Init->Mode == GPIO_MODE_AF_OD))
{
/* 检查速度参数的有效性 */
assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));
/* 配置IO速度 */
temp = GPIOx->OSPEEDR;
temp &= ~(GPIO_OSPEEDER_OSPEEDR0 << (position * 2));
temp |= (GPIO_Init->Speed << (position * 2));
GPIOx->OSPEEDR = temp;
/* 配置IO输出类型 */
temp = GPIOx->OTYPER;
temp &= ~(GPIO_OTYPER_OT_0 << position) ;
temp |= (((GPIO_Init->Mode & GPIO_OUTPUT_TYPE) >> 4) << position);
GPIOx->OTYPER = temp;
}
/* 激活当前IO的上拉或下拉电阻 */
temp = GPIOx->PUPDR;
temp &= ~(GPIO_PUPDR_PUPDR0 << (position * 2));
temp |= ((GPIO_Init->Pull) << (position * 2));
GPIOx->PUPDR = temp;
/*--------------------- 配置外部中断模式 ------------------------*/
/* 配置当前IO的外部中断或事件 */
if((GPIO_Init->Mode & EXTI_MODE) == EXTI_MODE)
{
/* 使能SYSCFG时钟 */
__HAL_RCC_SYSCFG_CLK_ENABLE();
temp = SYSCFG->EXTICR[position >> 2];
temp &= ~(((uint32_t)0x0F) << (4 * (position & 0x03)));
temp |= ((uint32_t)(GPIO_GET_INDEX(GPIOx)) << (4 * (position & 0x03)));
SYSCFG->EXTICR[position >> 2] = temp;
/* 清除外部中断线配置 */
temp = EXTI->IMR;
temp &= ~((uint32_t)iocurrent);
if((GPIO_Init->Mode & GPIO_MODE_IT) == GPIO_MODE_IT)
{
temp |= iocurrent;
}
EXTI->IMR = temp;
temp = EXTI->EMR;
temp &= ~((uint32_t)iocurrent);
if((GPIO_Init->Mode & GPIO_MODE_EVT) == GPIO_MODE_EVT)
{
temp |= iocurrent;
}
EXTI->EMR = temp;
/* 清除上升沿下降沿触发配置 */
temp = EXTI->RTSR;
temp &= ~((uint32_t)iocurrent);
if((GPIO_Init->Mode & RISING_EDGE) == RISING_EDGE)
{
temp |= iocurrent;
}
EXTI->RTSR = temp;
temp = EXTI->FTSR;
temp &= ~((uint32_t)iocurrent);
if((GPIO_Init->Mode & FALLING_EDGE) == FALLING_EDGE)
{
temp |= iocurrent;
}
EXTI->FTSR = temp;
}
}
}
}
HAL_GPIO_EXTI_Callback()
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) // 定义HAL_GPIO_EXTI_Callback回调函数,当GPIO引脚发生外部中断时被调用
{
if (GPIO_Pin == GPIO_PIN_13) // 检查触发中断的GPIO引脚是否为13号引脚
{
/* Toggle LED1 */
BSP_LED_Toggle(LED1); // 切换LED1的状态(如果是亮的则熄灭,反之亦然)
printf("\n\rLED1 switched\n\r"); // 向串口打印消息,表示LED1的状态已切换
}
}
HAL_GPIO_EXTI_Callback()\BSP_LED_Toggle()
void BSP_LED_Toggle(Led_TypeDef Led)
{
GPIO_TypeDef* gpio_led; // 定义一个指向GPIO端口的指针变量
// 实际上这里只有一个LED被处理
switch(Led)
{
case LED1: // 如果传入的参数是LED1
gpio_led = LED1_GPIO_PORT; // 将指针指向LED1的GPIO端口
break;
case LED2: // 如果传入的参数是LED2
gpio_led = LED2_GPIO_PORT; // 将指针指向LED2的GPIO端口
break;
case LED3: // 如果传入的参数是LED3
gpio_led = LED3_GPIO_PORT; // 将指针指向LED3的GPIO端口
break;
case LED4: // 如果传入的参数是LED4
gpio_led = LED4_GPIO_PORT; // 将指针指向LED4的GPIO端口
break;
default: // 如果传入的参数不是以上几种情况
break; // 什么也不做
}
HAL_GPIO_TogglePin(gpio_led, GPIO_PIN[Led]); // 切换对应GPIO端口的引脚状态(高电平变低电平,低电平变高电平)
}
切换指定LED的状态
解释原理,上述代码中
在哪个地方设置的GPIO口的中断和触发模式
void EXTI15_10_IRQHandler_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable GPIOC clock */
__HAL_RCC_GPIOC_CLK_ENABLE(); // 使能GPIOC时钟
/* Configure PC.13 pin as input floating */
GPIO_InitStructure.Mode = GPIO_MODE_IT_FALLING; // 设置PC13引脚为下降沿触发中断
GPIO_InitStructure.Pull = GPIO_NOPULL; // 配置GPIO引脚无内部上拉或下拉
GPIO_InitStructure.Pin = GPIO_PIN_13;
HAL_GPIO_Init(GPIOC, &GPIO_InitStructure); // 初始化PC13引脚配置
/* Enable and set EXTI lines 15 to 10 Interrupt to the lowest priority */
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 2, 0); // 设置EXTI15_10中断优先级为2
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn); // 使能EXTI15_10中断
}- 使能GPIOC外设时钟,以便使用PC.13引脚。
- 配置PC.13引脚为下降沿触发的中断模式,无内部上拉或下拉。
- 设置并使能EXTI15_10中断,优先级设置为2(相对较低的优先级)
如何绑定到中断函数HAL_GPIO_EXTI_Callback
通过中断处理程序(IRQ Handler)和相应的中断处理函数(HAL_GPIO_EXTI_IRQHandler)间接绑定的
- 配置GPIO引脚为中断模式:这包括设置GPIO引脚的模式为中断模式(上升沿、下降沿或双边沿触发),并初始化GPIO引脚。
- 配置中断优先级和使能中断:通过设置NVIC的中断优先级并使能中断。
- 实现中断处理程序(IRQ Handler):在IRQ Handler中调用 HAL_GPIO_EXTI_IRQHandler 函数。
- 实现中断回调函数 HAL_GPIO_EXTI_Callback:在回调函数中处理具体的中断事件。



